A robot in the barn: automating feeding on farms

Feed management is among the most repetitive and time-consuming activities on cattle farms: moving food closer to the feed racks can require hours of work every day, especially in medium-sized and large barns. The feed-pushing robots currently available on the market offer an initial response to this need, but they still have significant limitations that make their adoption difficult for small and medium-sized livestock farms, which are the predominant type in the Italian context.
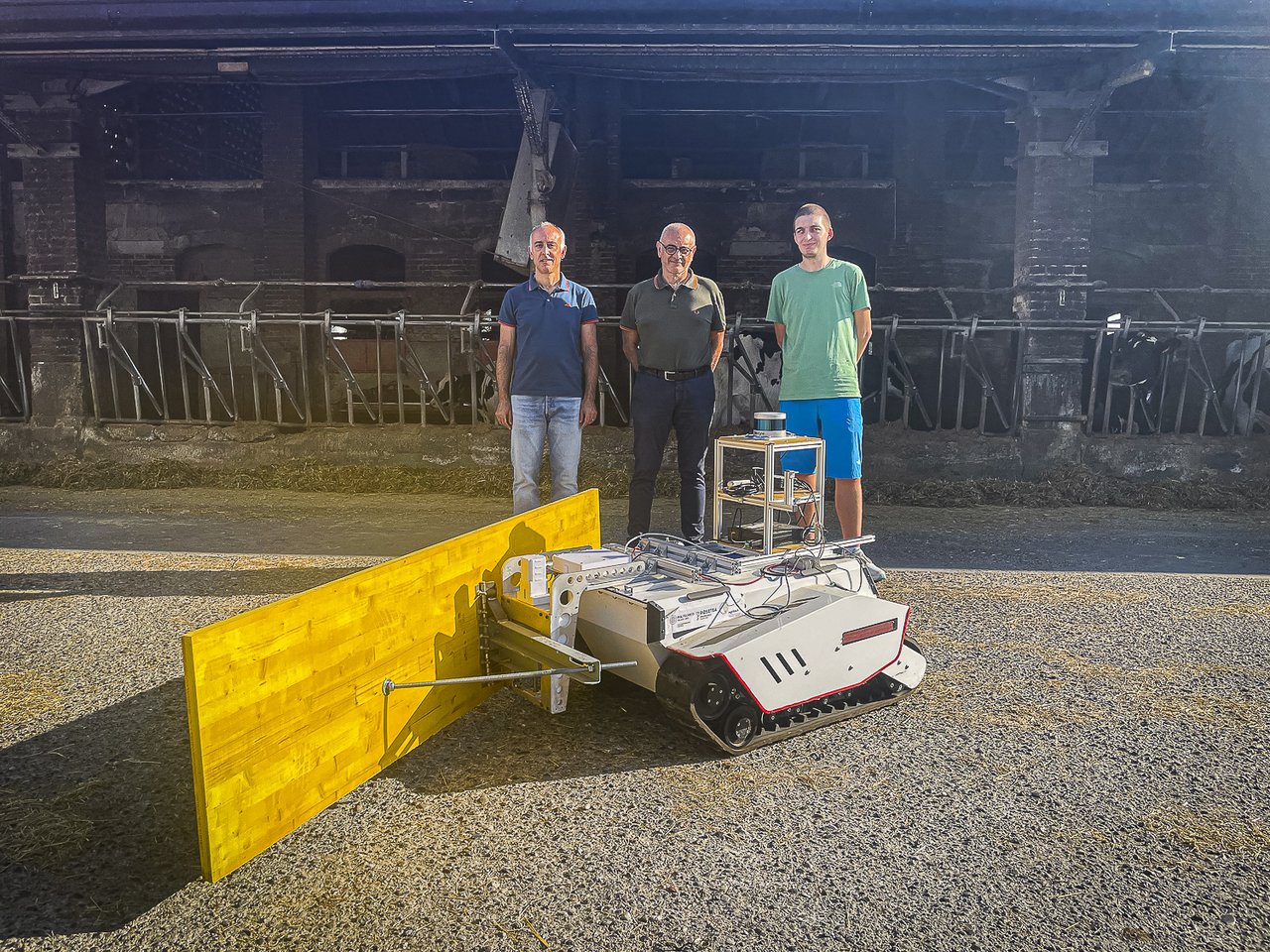
The ROSETEA laboratory at the Politecnico di Milano's Cremona Campus, with the support of Fondazione LGH E.T.S. and as part of the Master's Degree in Agricultural Engineering, has developed a prototype autonomous robot designed to address these critical issues. Luca Bascetta, professor at the Department of Electronics, Information and Bioengineering and coordinator of the Master's Degree in Agricultural Engineering, and Mattia Dutto, national PhD candidate in Artificial Intelligence, who worked on the research project together with Professor Gianni Ferretti, professor at the Department of Electronics, Information and Bioengineering, discuss it.
What is the robot you designed like, and what does it do?
Mattia Dutto: It is a small tracked vehicle with, at the front, a wooden construction plank that pushes the forage towards the animals. It is able to move autonomously from one barn to another, avoiding obstacles and operating on any type of surface, not necessarily smooth as many of the devices already on the market require.

What challenges in the sector does it seek to address?
Luca Bascetta: The devices currently on the market present some serious critical issues for farmers.
The first concerns infrastructure: many robots require a metal or magnetic track embedded in the floor for orientation, which represents a significant barrier for existing barns.
Secondly, many of these devices work well only on smooth surfaces, which becomes problematic when the same robot is intended to serve multiple barns, often connected by dirt tracks.
Many are not even able to manage obstacles autonomously: if a tractor is parked outside the barn, it is not certain that the device will be able to avoid it. Added to this are the high costs: equipping each barn with its own robot entails a significant investment, especially for the small and medium-sized businesses that characterize the Italian landscape.
Finally, in the current market each task is assigned to a dedicated robot. Our prototype, thanks to the possibility of changing the front tool, could also perform other functions, such as cleaning internal corridors.
MD: I would also add one final critical issue: the large size and weight of many robots on the market reduce both their operating speed and their autonomy. We are talking about about one hour of work to cover 700 metres, followed by one hour of recharging. Our prototype, thanks to its more compact size, guarantees greater autonomy and can cover multiple barns in a single cycle.
Why, in your view, have these critical issues not yet been addressed by the manufacturers already present on the market?
MD: Speaking with farmers and operators in the sector, I have found that the average farmer, unless funding or grants are available, tends not to adapt to technology if what they have continues to work. If a thirty-year-old tractor is still working, people often prefer to keep using it rather than replace it with more high-performance vehicles. In the next five to ten years, also thanks to generational turnover, I believe we will see a growing spread of automation in barns and, with it, an acceleration of innovation in this area. The new generations of farmers already think in terms of amortization: a 30,000-euro robot, recouped in two years, becomes a worthwhile investment. A farmer with decades of experience in a certain way of working may instead consider it preferable to have a person, partly because that person can also carry out other tasks.

How much can it concretely reduce farmers' workload?
MD: It depends on the size of the barn. In a barn with 100 head of cattle, the operation of moving the forage closer may take five minutes: in that case, considering the cost of the robot, it might be more practical to rely on a snow blade and a tractor that are already available. In a barn with 1,000 head of cattle, the same operation takes about 50 minutes. Repeated several times a day (even five, six, seven times), the advantages become significant: a robot that automatically moves the forage closer can save up to five or six hours of daily work, which can be devoted to other activities. In addition, moving the forage closer leads the animals to eat continuously and therefore to an increase in production.
How does your robot work from a technical point of view? How does it manage to move autonomously?
MD: For outdoor navigation it is possible to use GPS, although in our research (which is configured as a Proof of Concept limited to a single barn) we are not using it. For indoor navigation, instead, we use LiDAR, a sensor that emits laser beams and measures the distance from surrounding objects, allowing the robot to move among them. LiDAR is now a widespread technology: Apple introduced it in the iPhone 12 Pro, and it is also used in architecture for mapping spaces and in autonomous driving.
What were the main challenges you encountered from a technical point of view?
MD: The first was the difficulty of reproducing the barn in the laboratory: there are no standard models, so we had to make numerous approximations. The other significant challenge concerned the construction of the blade. We reached the fourth iteration: the first was too heavy and almost impossible to manoeuvre; the second had problems with forage flow; the third was more inclined and partially improved this aspect. The fourth solution, the construction plank, proved to be the most effective: it is a rigid, straight system that can be more easily inclined than the previous aluminium versions.

Version 2 of the shovel: made from aluminium, fitted with a motor for raising and lowering the tool. Credits: Mattia Dutto

Version 4 of the blade: the aluminium blade has been replaced with a wooden construction plank, allowing for an increase in its length and angle. Credits: Mattia Dutto
What stage is the project at? Has the prototype already been tested?
MD: With respect to the objectives envisaged by the project funded by Fondazione LGH, we have achieved almost all of them. The only aspect still open is managing the switch between indoor and outdoor navigation, which probably cannot be solved with the current architecture.
The prototype was tested at the Baroncina farm; obstacle-avoidance tests, on the other hand, were conducted in the laboratory. This part was addressed last, considering that in the areas near the feeders obstacles are in practice infrequent. They become relevant, however, when moving from one feeder to another, both for dynamic obstacles, such as a moving tractor, and for fixed obstacles.
What steps are needed to turn the prototype into a commercial product?
MD: The first step would be to conduct extensive, long-duration tests. The second concerns the engineering of the machine: in its current state it is a research product, with components mounted in positions that are not always optimal. The third step is rewriting the code in Python or C++, to ensure greater reliability by operating directly on the operating system. This phase should be followed by the development of a graphical interface that is more accessible for the end user. These are, however, steps that fall within the remit of a company.
How do you imagine the future development of this project within the broader field of barn automation?
LB: This robot is a component of a more articulated system, namely barn automation. In Italy, where livestock farms are often small in size, automation can have a decisive impact. If a barn is managed by two people who have to take care of both the animals and the crops used to produce feed, the workload risks becoming unsustainable. Hiring additional staff would make livestock farming economically unviable for many businesses. An integrated automation system - automatic milking, route management, internal cleaning, food preparation and distribution - would instead allow the two people to concentrate on the activities that require their direct presence, intervening only in response to system alarms.
Do you have any further research developments connected to this project planned?
LB: One area we want to explore further concerns the interaction between the robot and the animals. The robot could cause stress to the cows, with potential effects on the quantity or quality of the milk, and therefore on the economic viability of the farm. We are already setting up everything needed to start the first tests in the barn. The literature on this topic is almost non-existent, so we do not yet know what the animals' response will be.

You might also like

The creative force of mathematics, in the words of Sachiko Nakajima
The scientist and pianist is a tireless promoter of topics such as STEM, diversity and inclusion. In this interview she told us about her artistic world and her vision of mathematics.

Circular Fashion-Tech Lab: where fashion becomes truly circular
Integrating design and advanced technologies from a more sustainable perspective

Architecture is not architecture: Ma Yansong's lecture

Where design engages with living matter: B.Lab and the future of biodesign
The human being as part of an ecosystem. B.Lab, the new laboratory at Politecnico di Milano dedicated to biodesign and materials for transition, originates from this shift in perspective. Among mycelia, algae, bacterial cellulose and waste biomasses, the…