Un robot in stalla: automatizzare il foraggiamento nelle imprese agricole

La gestione del foraggio è tra le attività più ripetitive e time-consuming negli allevamenti bovini: avvicinare il cibo alle rastrelliere può richiedere ore di lavoro quotidiano, soprattutto nelle stalle di medie e grandi dimensioni. I robot spingiforaggio oggi disponibili sul mercato offrono una prima risposta a questa esigenza, ma presentano ancora limiti significativi che ne rendono difficile l'adozione nelle piccole e medie aziende zootecniche, realtà prevalente nel contesto italiano.
Il laboratorio ROSETEA del Polo territoriale di Cremona del Politecnico di Milano, con il sostegno di Fondazione LGH E.T.S. e nell'ambito del Corso di Laurea Magistrale in Agricultural Engineering, ha sviluppato un prototipo di robot autonomo pensato per rispondere a queste criticità. Ne parlano Luca Bascetta, docente del Dipartimento di Elettronica, Informazione e Bioingegneria e coordinatore della Laurea Magistrale in Agricultural Engineering, e Mattia Dutto, dottorando nazionale in Intelligenza Artificiale, che hanno lavorato al progetto di ricerca insieme al Professore Gianni Ferretti, docente del Dipartimento di Elettronica, Informazione e Bioingegneria.
Com'è fatto il robot che avete progettato e di cosa si occupa?
Mattia Dutto: È un piccolo cingolato con, nella parte anteriore, un'asse di legno da cantiere che spinge il foraggio verso gli animali. È in grado di muoversi autonomamente tra una stalla e l'altra, evitando gli ostacoli e operando su qualunque tipo di superficie, non necessariamente liscia come richiedono invece molti dei dispositivi già presenti sul mercato.

Prototipo di robot spingiforaggio del laboratorio ROSOTEA, Azienda agricola Baroncina, 2025. Credits: Mattia Dutto
A quali sfide del settore cerca di rispondere?
Luca Bascetta: I dispositivi attualmente in commercio presentano alcune criticità serie per gli allevatori.
La prima riguarda le infrastrutture: molti robot richiedono una pista metallica o magnetica integrata nel pavimento per orientarsi, il che rappresenta una barriera significativa per le stalle già esistenti.
In secondo luogo, gran parte di questi dispositivi funziona bene solo su superfici lisce, il che diventa problematico nel momento in cui si vuole servire più stalle con lo stesso robot, spesso collegate da percorsi in terra battuta.
Molti non sono nemmeno in grado di gestire autonomamente gli ostacoli: se fuori dalla stalla è parcheggiato un trattore, non è detto che il dispositivo riesca ad evitarlo. A questo si aggiungono i costi elevati: dotare ogni stalla di un robot proprio comporta un investimento significativo, soprattutto per le realtà di piccole-medie dimensioni che caratterizzano il panorama italiano.
Infine, sul mercato attuale ogni compito è assegnato a un robot dedicato. Il nostro prototipo, grazie alla possibilità di cambiare l'utensile frontale, potrebbe svolgere anche altre funzioni, come la pulizia dei corridoi interni.
MD: Aggiungerei anche un'ultima criticità: le dimensioni e il peso elevati di molti robot in commercio ne riducono sia la velocità operativa sia l'autonomia. Si parla di circa un'ora di lavoro per coprire 700 metri, seguita da un'ora di ricarica. Il nostro prototipo, grazie alle dimensioni più contenute, garantisce un'autonomia maggiore e può coprire più stalle in un unico ciclo.
Per quale motivo, secondo voi, queste criticità non sono state ancora affrontate dai produttori già presenti sul mercato?
MD: Parlando con allevatori e operatori del settore, ho riscontrato che l'agricoltore medio, salvo disponibilità di finanziamenti o contributi, tende a non adeguarsi alla tecnologia se quella che ha continua a funzionare. Se un trattore di trent'anni fa è ancora funzionante, spesso si preferisce continuare a usarlo invece che sostituirlo con mezzi più performanti. Nei prossimi cinque-dieci anni, anche grazie al ricambio generazionale, credo che vedremo una diffusione crescente dell'automazione in stalla e, con essa, un'accelerazione dell'innovazione in questo ambito. Le nuove generazioni di allevatori ragionano già in termini di ammortamento: un robot da 30.000 euro, recuperato in due anni, diventa un investimento conveniente. Un allevatore con decenni di esperienza in un certo modo di lavorare può invece ritenere preferibile avere una persona, anche perché quella persona può adempire anche ad altri compiti.

Il Robot spingiforaggio si trova in un caseificio con mucche e muove il fieno nella produzione lattiero-casearia. Credits: iStock
Quanto può ridurre concretamente il carico di lavoro degli allevatori?
MD: Dipende dalle dimensioni della stalla. In una stalla da 100 capi, l'operazione di avvicinamento del foraggio può durare cinque minuti: in quel caso, considerato il costo del robot, potrebbe essere più pratico affidarsi a una pala da neve e a un trattore già disponibile. In una stalla da 1.000 capi, la stessa operazione richiede circa 50 minuti. Ripetuta più volte al giorno (anche cinque, sei, sette volte) i vantaggi diventano significativi: un robot che avvicina automaticamente il foraggio può arrivare a far risparmiare cinque o sei ore di lavoro quotidiano, che possono essere dedicate ad altre attività. Inoltre, l’avvicinamento del foraggio porta gli animali a mangiare in continuazione e quindi ad un incremento di produzione.
Come funziona il vostro robot dal punto di vista tecnico? Come riesce a muoversi in modo autonomo?
MD: Per la navigazione outdoor è possibile utilizzare il GPS, anche se nella nostra ricerca (che si configura come una Proof of Concept circoscritta a una singola stalla) non lo stiamo impiegando. Per la navigazione indoor utilizziamo invece il LiDAR, un sensore che emette raggi laser e misura la distanza dagli oggetti circostanti, consentendo al robot di muoversi tra di essi. Il LiDAR è ormai una tecnologia diffusa: Apple lo ha introdotto nell'iPhone 12 Pro, viene usato anche in architettura per la mappatura degli spazi e nella guida autonoma.
Quali sono state le sfide principali che avete riscontrato dal punto di vista tecnico?
MD: La prima è stata la difficoltà di riprodurre la stalla in laboratorio: non esistono modelli standard, quindi abbiamo dovuto fare numerose approssimazioni. L'altra sfida rilevante ha riguardato la costruzione della pala. Siamo arrivati alla quarta iterazione: la prima era troppo pesante e quasi impossibile da manovrare; la seconda presentava problemi di scorrimento del foraggio; la terza era più inclinata e migliorava parzialmente questo aspetto. La quarta soluzione, l'asse da cantiere, si è rivelata la più efficace: è un sistema rigido, dritto e più facilmente inclinabile rispetto alle versioni in alluminio precedenti.

Versione della pala numero 2: sviluppata in alluminio, dotata di un motore per il sollevamento e l’abbassamento dell’attrezzo. Credits: Mattia Dutto

Versione della pala numero 4: è stata sostituita la pala in alluminio con un asse da cantiere di legno, permettendo di incrementare la lunghezza e l’angolatura della stessa. Credits: Mattia Dutto
A che punto siete con il progetto? Il prototipo è già stato testato?
MD: Rispetto agli obiettivi previsti dal progetto finanziato da Fondazione LGH, li abbiamo raggiunti quasi tutti. L'unico aspetto ancora aperto è la gestione dello switch tra navigazione indoor e outdoor, che probabilmente non è risolvibile con l'architettura attuale.
Il prototipo è stato testato presso l'azienda Baroncina; i test per il superamento degli ostacoli sono stati invece condotti in laboratorio. Questa parte è stata affrontata per ultima, considerando che nelle aree vicine alle mangiatoie gli ostacoli sono nella pratica poco frequenti. Diventano invece rilevanti negli spostamenti tra una mangiatoia e l'altra, sia per ostacoli dinamici, come un trattore in movimento, sia per ostacoli fissi.
Quali sono i passaggi necessari per trasformare il prototipo in un prodotto commerciale?
MD: Il primo passo sarebbe condurre test estensivi e di lunga durata. Il secondo riguarda l'ingegnerizzazione della macchina: allo stato attuale è un prodotto di ricerca, con componenti montati in posizioni non sempre ottimali. Il terzo step è la riscrittura del codice in Python o C++, per garantire una maggiore affidabilità operando direttamente sul sistema operativo. A questa fase dovrebbe seguire lo sviluppo di un'interfaccia grafica più accessibile per l'utente finale. Si tratta però di passaggi che competono a un'azienda.
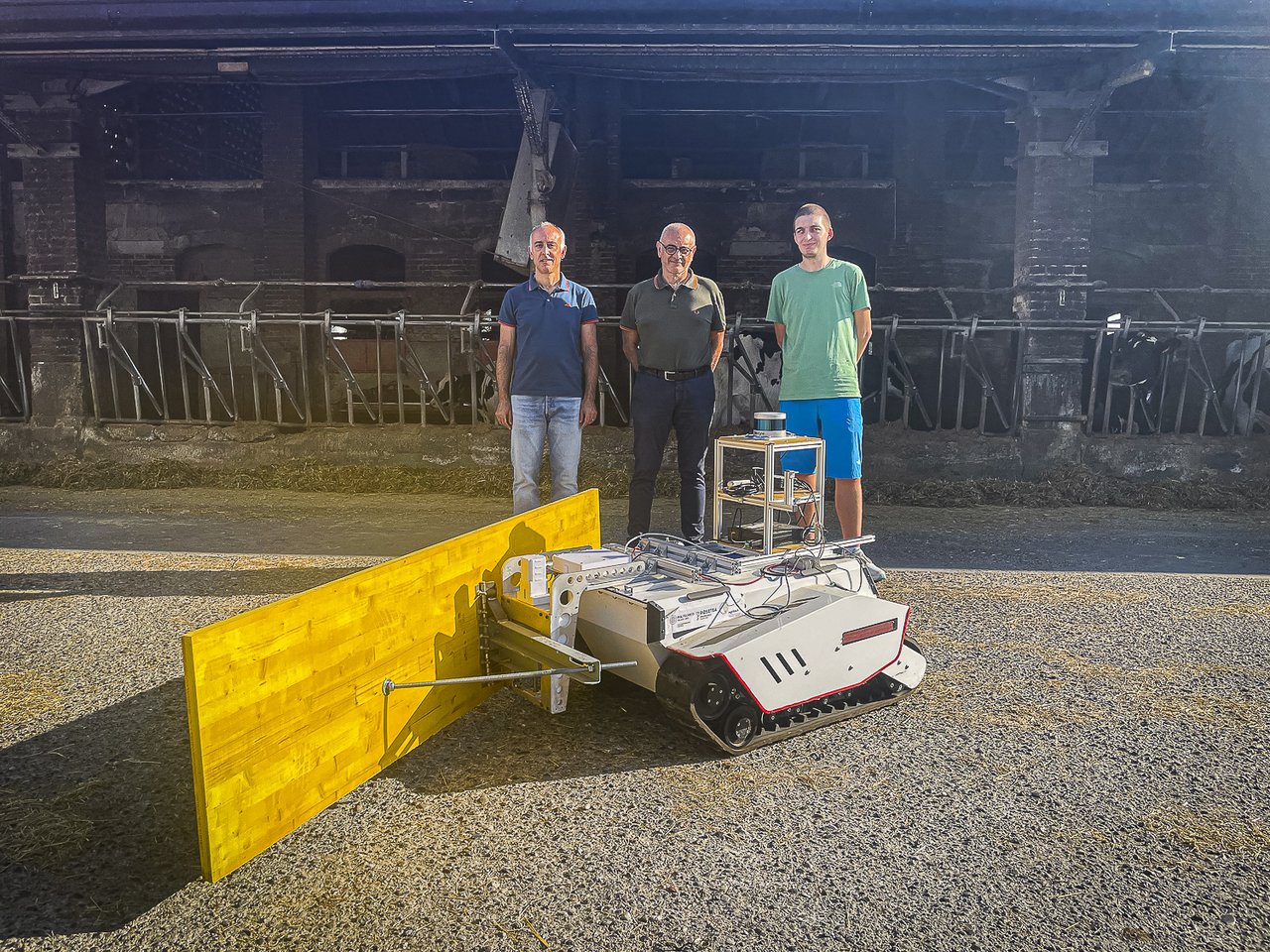
Da sinistra a destra: Luca Bascetta, Gianni Ferretti, Mattia Dutto, Azienda agricola Baroncina, 2025. Credits: LGH
Come immaginate lo sviluppo futuro di questo progetto nell'ambito più ampio dell'automazione di stalla?
LB: Questo robot è un componente di un sistema più articolato, che è quello dell'automazione di stalla. In Italia, dove le realtà zootecniche sono spesso di piccole dimensioni, l'automazione può avere un impatto determinante. Se una stalla è gestita da due persone che devono occuparsi sia degli animali sia delle colture per produrre il mangime, il carico di lavoro rischia di diventare insostenibile. Assumere personale aggiuntivo, per molte aziende, renderebbe l'allevamento economicamente non conveniente. Un sistema di automazione integrato — mungitura automatica, gestione dei percorsi, pulizia interna, preparazione e distribuzione del cibo — consentirebbe invece alle due persone di concentrarsi sulle attività che richiedono la loro presenza diretta, intervenendo solo in risposta agli allarmi del sistema.
Avete in programma altri sviluppi di ricerca collegati a questo progetto?
LB: Un filone che vogliamo approfondire riguarda l'interazione tra il robot e gli animali. Il robot potrebbe causare stress alle mucche, con potenziali ricadute sulla quantità o sulla qualità del latte, e quindi sull'economicità dell'allevamento. Stiamo già allestendo tutto il necessario per avviare le prime prove in stalla. La letteratura su questo tema è quasi inesistente, quindi non sappiamo ancora quale sarà la risposta degli animali.

Azienda agricola Baroncina, settembre 2025. Credits: Mattia Dutto
Sullo stesso tema

Guida autonoma nell'agricoltura: il ruolo della simulazione virtuale tra ricerca e applicazioni reali
Un ponte tra ricerca accademica e mondo applicativo dell'agricoltura autonoma.

Contrastare la malnutrizione attraverso fattorie multifunzionali: il progetto I-FERME in Congo
Polisocial: il progetto I-FERME in Congo
Potrebbe interessarti

L'architettura non è architettura, la lezione di Ma Yansong

Nel museo dei laser dove la fisica racconta la sua storia
Strumenti d’epoca e prototipi pionieristici ripercorrono un secolo di ricerca, fino ai laser ultraveloci e alla scienza degli attosecondi.
Bob, biciclette, carrozzine e piedi: l’HexaLab di Lecco è il simulatore multisport più avanzato al mondo
L'HexaLab del Polo Territoriale di Lecco si basa sulla pratica dello Human in the loop, per cui l’essere umano può controllare il simulatore e interagire fisicamente con l’attrezzo e il mondo “simulato” che lo circonda.

Le persone e le idee dietro gli occhiali del futuro: storie di ricerca dallo Smart Eyewear Lab
Un racconto appassionato del laboratorio del Politecnico di Milano e di EssilorLuxottica, attraverso le voci dei suoi ricercatori

Arte, scienza e tecnologia nel design unico delle hypercar di Horacio Pagani
A tu per tu con l’imprenditore italo-argentino, fondatore della Pagani Automobili, che col suo talento ha rivoluzionato il settore automotive