Prima ancora di muoversi nei campi, i robot agricoli prendono forma in ambienti virtuali. È nella simulazione che si studiano traiettorie, si misurano errori, si valutano tempi e risorse energetiche, riducendo costi e rischi prima di passare alla sperimentazione reale. Per Stefano Arrigoni, ricercatore del Dipartimento di Meccanica del Politecnico di Milano, la simulazione non è soltanto uno strumento tecnico, ma un vero e proprio ponte tra la ricerca accademica e il mondo applicativo dell’agricoltura autonoma.
In questa intervista Stefano racconta il suo percorso e i risultati di due studi che utilizzano ambienti virtuali tridimensionali per progettare e valutare sistemi di guida autonoma in ambito agricolo, dall’harvesting nei grandi campi aperti fino alla navigazione precisa tra i filari dei vigneti.

Partiamo dal tuo percorso: come sei arrivato al Politecnico di Milano e a occuparti di guida autonoma?
Il mio percorso si è svolto interamente al Politecnico di Milano: triennale, magistrale e dottorato. Vengo da una famiglia legata alla meccanica – mio padre è carrozziere – quindi le macchine hanno sempre fatto parte della mia vita. Fin da piccolo mi affascinava l’idea di costruire, toccare con mano e capire come funzionassero le cose.
Durante gli studi mi sono avvicinato sempre di più alla meccatronica, al controllo e all’automazione. Un passaggio fondamentale è stato il periodo della tesi magistrale, quando sono stato sei mesi all’Università di Berkeley, in California. Lì ho visto da vicino attività di ricerca sulla guida autonoma che negli Stati Uniti erano già considerate una direzione concreta, mentre in Italia sembravano ancora fantascienza. Tornando, mi sono portato dietro la consapevolezza che quei temi sarebbero diventati centrali anche in Europa, solo con qualche anno di ritardo. Da qui la decisione di continuare su questa strada anche nel dottorato e poi come ricercatore.
A un certo punto la guida autonoma incontra l’agricoltura. Come nasce questa scelta?
Nasce da una riflessione molto concreta sul ruolo che può avere l’università in ambiti tecnologicamente complessi come quello della guida autonoma. Al Politecnico, e in particolare nel nostro Dipartimento di Meccanica, lavoriamo su questi temi da molti anni: già dal 2016 portiamo veicoli autonomi in contesti reali, come autodromo e parco di Monza. Sono attività di grande valore scientifico, che mostrano in modo molto chiaro quale potrebbe essere il futuro della mobilità.
Allo stesso tempo, però, mi sono reso conto che difficilmente può essere l’università a guidare direttamente una rivoluzione come quella dell’automotive su strada. Servono investimenti enormi, infrastrutture, e soprattutto bisogna affrontare questioni di sicurezza e normative che vanno oltre ciò che un ateneo, per sua natura, può sostenere. Le idee nascono spesso in ambito accademico, ma poi vengono sviluppate e portate sul mercato dalle aziende.
A un certo punto mi sono quindi chiesto dove, come università e come gruppo di ricerca relativamente piccolo, potessimo davvero massimizzare il nostro impatto. L’agricoltura mi è sembrata una risposta naturale. È un ambito più di nicchia, meno vincolato dal punto di vista normativo e più aperto alla sperimentazione concreta.

C’era poi un altro elemento importante: portarmi dietro il mio bagaglio di competenze sulla guida autonoma e applicarlo in un contesto più sfidante dal punto di vista dinamico, come quello agricolo. I campi non sono strade lisce, ma ambienti complessi e variabili, ed è proprio questo che rende la ricerca interessante per noi che veniamo dalla meccanica.
Infine, c’è anche una considerazione più ampia legata alle opportunità e alle priorità europee. Tra i settori su cui oggi si concentrano maggiormente le risorse per la ricerca ci sono da un lato la mobilità, dall’altro un’agricoltura sempre più attenta alla sostenibilità, all’uso consapevole delle risorse, alla riduzione di diserbanti e consumi idrici. Mettere insieme questi due mondi mi è sembrato un modo coerente e promettente per far dialogare ricerca, tecnologia e impatto reale.
Nel vostro lavoro la simulazione ha un ruolo centrale. Perché è così importante?
Fare sperimentazione direttamente in campo è costoso, richiede tempo ed è difficile da ripetere in modo controllato. La simulazione permette invece di testare soluzioni in maniera sistematica, con costi ridotti e grande ripetibilità. È uno strumento che consente di esplorare molte più condizioni di quante sarebbe possibile provare nella realtà.
Nei nostri studi usiamo simulatori tridimensionali sviluppati e forniti da realtà aziendali con cui collaboriamo e che supportano la nostra attività di ricerca. Si tratta di strumenti progettati per affrontare le complessità dell’ambiente agricolo e che ci permettono di studiare problemi specifici dell’agricoltura autonoma, introducendo scenari realistici e analizzando l’impatto di pendenze, irregolarità del terreno e condizioni operative complesse.
In questo senso, la simulazione diventa il ponte tra i modelli teorici e ciò che accade davvero sul campo: non serve solo a testare soluzioni, ma anche a capire quali idee vale davvero la pena portare fuori dal laboratorio e sperimentare nella realtà.

Uno dei vostri studi riguarda le operazioni di harvesting. Qual era l’obiettivo principale?
Ci siamo concentrati sulle operazioni di raccolta, come il taglio dell’erba medica o del frumento, confrontando due strategie di percorrenza del campo molto diffuse nella pratica agricola. La prima è la modalità a “sali e scendi” con curve a 180 gradi e traiettorie parallele, la seconda è quella a spirale, che parte dai bordi e si chiude progressivamente verso il centro.
In condizioni ideali la strategia a sali e scendi risulta generalmente più efficiente. Tuttavia volevamo capire cosa succede quando si introduce la complessità reale del terreno: pendenze, irregolarità, scostamenti laterali. Grazie alla simulazione abbiamo potuto misurare tempi di lavoro, consumi energetici e perdite di efficienza prima ancora di effettuare prove in campo. Questo approccio consente di ridurre il numero di test necessari sul campo e di arrivare alla sperimentazione reale con scelte già informate e più robuste.

Cosa avete osservato introducendo la complessità reale del terreno?
Abbiamo visto che l’irregolarità del terreno penalizza maggiormente la strategia a sali e scendi. Per evitare di lasciare porzioni di campo non raccolte è necessario aumentare la sovrapposizione tra le traiettorie, con un conseguente aumento del numero di passaggi.
La simulazione permette di quantificare questa perdita di efficienza e di valutare, in base alla geometria e alle condizioni del campo, quale strategia sia più adatta. Non si tratta quindi di scegliere una soluzione astratta, ma di supportare decisioni operative concrete.
Il secondo studio si concentra invece nei vigneti, un contesto molto diverso dall’harvesting. Qual è la sfida principale della guida autonoma in vigna?
Nei vigneti la parola chiave è precisione. Si lavora su colture di alto valore, dove anche piccoli errori laterali possono causare danni significativi ai filari. A differenza dell’harvesting, qui non conta tanto coprire grandi superfici nel minor tempo possibile, ma muoversi con estrema accuratezza in spazi stretti e spesso irregolari.
In questo contesto il GPS, che è una tecnologia molto diffusa in agricoltura, non sempre è sufficiente. Quando il robot si muove all’interno dei filari, l’errore laterale deve essere minimo, e il segnale satellitare può non garantire l’affidabilità necessaria. Per questo abbiamo studiato un approccio basato principalmente su sensori di bordo, come lidar e sensori di distanza, che permettono al robot di localizzarsi in modo relativo rispetto ai filari e mantenersi al centro.
Il GPS viene invece utilizzato solo in momenti specifici, come le manovre di svolta tra un filare e l’altro, dove le condizioni sono più favorevoli. Anche in questo caso la simulazione è stata fondamentale: ci ha permesso di testare il comportamento del sistema in presenza di pendenze, terreni ondulati e filari non perfettamente regolari, tipici dei vigneti reali, che spesso si trovano in zone collinari o terrazzate.
L’obiettivo è capire entro quali limiti queste soluzioni funzionano in modo affidabile, stimando l’errore laterale massimo accettabile e individuando le condizioni in cui l’automazione può davvero supportare lavorazioni di alta qualità.

Ma come si simula davvero un terreno agricolo, che per definizione è irregolare e cambia nel tempo?
È una delle sfide più interessanti, perché i simulatori nascono dall’automotive, dove la strada è un elemento sostanzialmente invariabile. In agricoltura, invece, il terreno ha pendenze, ondulazioni, granularità diverse e, soprattutto, si modifica mentre ci si lavora sopra.
Nel nostro caso abbiamo iniziato modellando il terreno in tre dimensioni combinando diversi elementi: una pendenza media, ondulazioni più ampie e irregolarità più locali, ottenute tramite funzioni geometriche. Variando i parametri di questi modelli abbiamo potuto simulare condizioni più o meno critiche e osservare come i sistemi di controllo reagiscono.
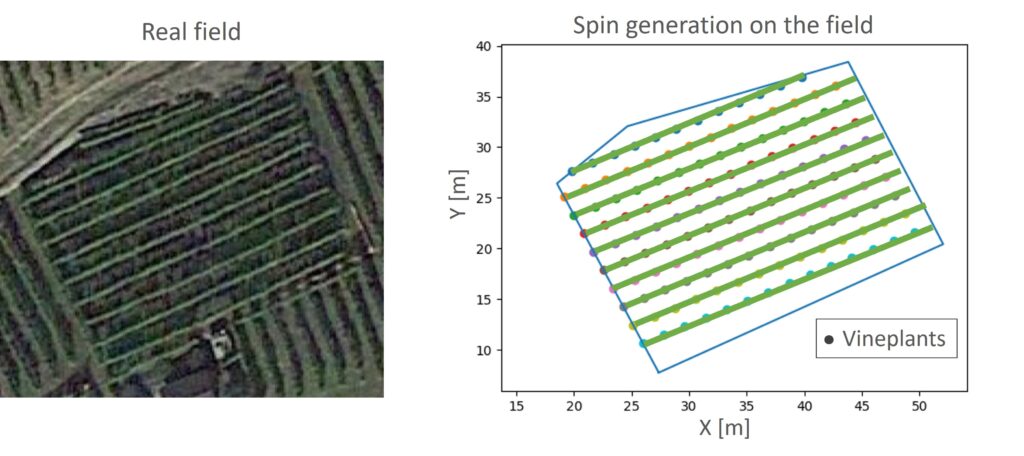
Un aspetto molto interessante riguarda la ricostruzione di campi reali. Per esempio, nel caso dei vigneti, siamo riusciti a ricostruire automaticamente la geometria dei filari partendo da immagini satellitari, riproducendo con precisione la disposizione planimetrica. L’altezza del terreno, invece, può essere stimata o misurata con dati raccolti sul campo, oppure – in prospettiva – tramite droni o sensori lidar, arrivando a creare veri e propri gemelli digitali del campo agricolo.
Questo approccio permette di usare la simulazione non solo come strumento di test, ma come supporto continuo: si può simulare, decidere una strategia di lavoro e poi verificarla sul campo reale, riducendo errori e inefficienze.
Nei campi però non ci sono solo macchine: animali e persone rappresentano un problema serio per la sicurezza. Come si affronta questo aspetto?
È un tema cruciale, spesso sottovalutato. Nei contesti agricoli la visibilità è limitata: l’erba alta, la polvere sollevata dalle lavorazioni e le dimensioni dei mezzi rendono difficile individuare ostacoli a terra. Non parliamo solo di animali, ma anche di persone che possono trovarsi nel campo, magari chine o poco visibili.
Per questo la detection per la sicurezza è una delle priorità emergenti nell’agricoltura autonoma. L’idea è trasferire concetti già noti nell’automotive, come la frenata automatica di emergenza, ma adattandoli a condizioni molto più complesse. Nei campi non ci sono superfici pulite e contorni netti: i sensori devono distinguere tra vegetazione, terreno e presenze reali, spesso in ambienti altamente disturbati.
Anche qui la simulazione gioca un ruolo chiave, perché consente di testare sensori e algoritmi in scenari difficili senza correre rischi reali. È un passaggio fondamentale per sviluppare sistemi affidabili, in grado di aumentare non solo l’efficienza delle lavorazioni, ma soprattutto la sicurezza di chi opera – o semplicemente si trova – negli ambienti agricoli.
Guardando al futuro, quali sono le principali direzioni di sviluppo per l’automazione in ambito agricolo?
L’automazione in agricoltura è destinata a crescere molto, perché i margini di miglioramento dell’efficienza sono ancora enormi. A spingere in questa direzione non è solo l’innovazione tecnologica, ma anche un problema molto concreto: la difficoltà crescente nel trovare operatori disposti a lavorare nei campi. È un lavoro fisicamente impegnativo, spesso poco attrattivo per i giovani, e l’automazione può aiutare sia a compensare la mancanza di personale sia a rendere queste attività meno faticose.
Dal punto di vista tecnologico, l’agricoltura autonoma è un ambito particolarmente adatto al trasferimento di soluzioni già sviluppate in altri settori, come l’automotive o il militare. Molte tecnologie esistono già e possono essere riadattate, anche se non è un processo banale. In questo contesto strumenti come l’intelligenza artificiale e i digital twin possono fare davvero la differenza.
Un’altra direzione interessante è lo sviluppo di ecosistemi di robot cooperanti: trattori autonomi affiancati da droni o da altri robot terrestri, capaci di supportare ispezioni, monitoraggi e decisioni operative. È un approccio che potrebbe portare risultati concreti già nel breve termine.
Cosa continua a motivarti nel tuo lavoro di ricercatore?
La possibilità di vedere qualcosa prendere vita. Partire da un’idea, svilupparla in simulazione e poi osservare un sistema reale che si muove grazie a ciò che hai progettato è estremamente stimolante. È la dimostrazione che la ricerca non resta confinata sulla carta, ma può tradursi in applicazioni concrete.

Che consiglio daresti oggi a studenti e studentesse che vogliono avvicinarsi a questi ambiti di ricerca?
Il mio primo consiglio è di partire dalla passione per ciò che si vuole realizzare: se si ha voglia di costruire, sperimentare e vedere funzionare qualcosa, l’ambito della robotica e dell’automazione è ideale. Permette di coniugare studio teorico e attività pratiche, mettendo davvero le mani su macchine e sistemi, un’esperienza che oggi all’università è molto più accessibile grazie ai laboratori e alle riforme degli ultimi anni.
Il secondo consiglio riguarda la lungimiranza. Il mercato del lavoro e le tecnologie evolvono rapidamente: quello che oggi sembra importante, tra 5 o 10 anni potrebbe essere superato, mentre settori emergenti come l’intelligenza artificiale, i digital twin e la robotica agricola diventeranno centrali. È importante quindi orientarsi verso percorsi che abbiano un senso non solo nell’immediato, ma anche nel futuro, valutando cosa potrà avere un reale impatto.
Infine, il consiglio più importante è fare qualcosa che piaccia davvero. Non solo per trovare un lavoro, ma perché lavorare su ciò che si ama rende la ricerca e l’apprendimento molto più gratificanti.