
Le storie più recenti
Gli incontri di Frontiere
Christian Greco: il Museo come agorà
Il direttore del Museo Egizio di Torino racconta la trasformazione del museo in uno spazio di dialogo e innovazione. Grazie alla collaborazione con il Politecnico, la fotogrammetria e la modellazione 3D hanno rivoluzionato gli scavi a Saqqara, mentre il software SiME ha digitalizzato la gestione dei reperti. Per Greco, ogni oggetto è memoria, ogni museo è paesaggio culturale. L’antico Egitto diventa così chiave per comprendere il presente e costruire una cultura condivisa, inclusiva e consapevole.
Storie di ricerca
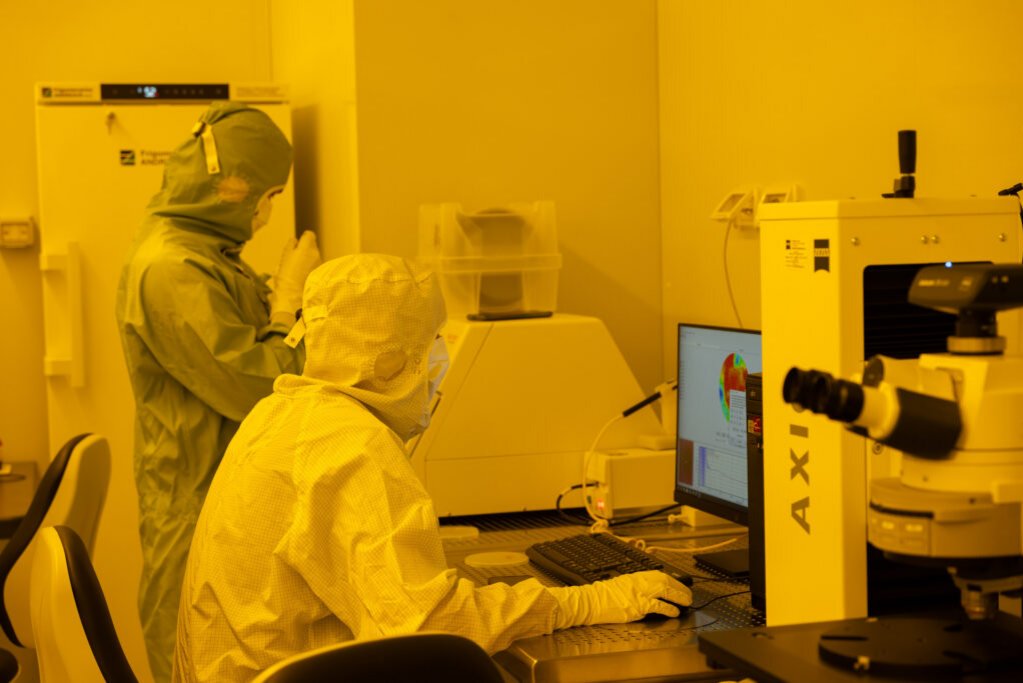
Polifab: l’officina del futuro del Politecnico di Milano compie 10 anni
Dentro la cleanroom di Polifab, dove si fabbrica il futuro della microtecnologia
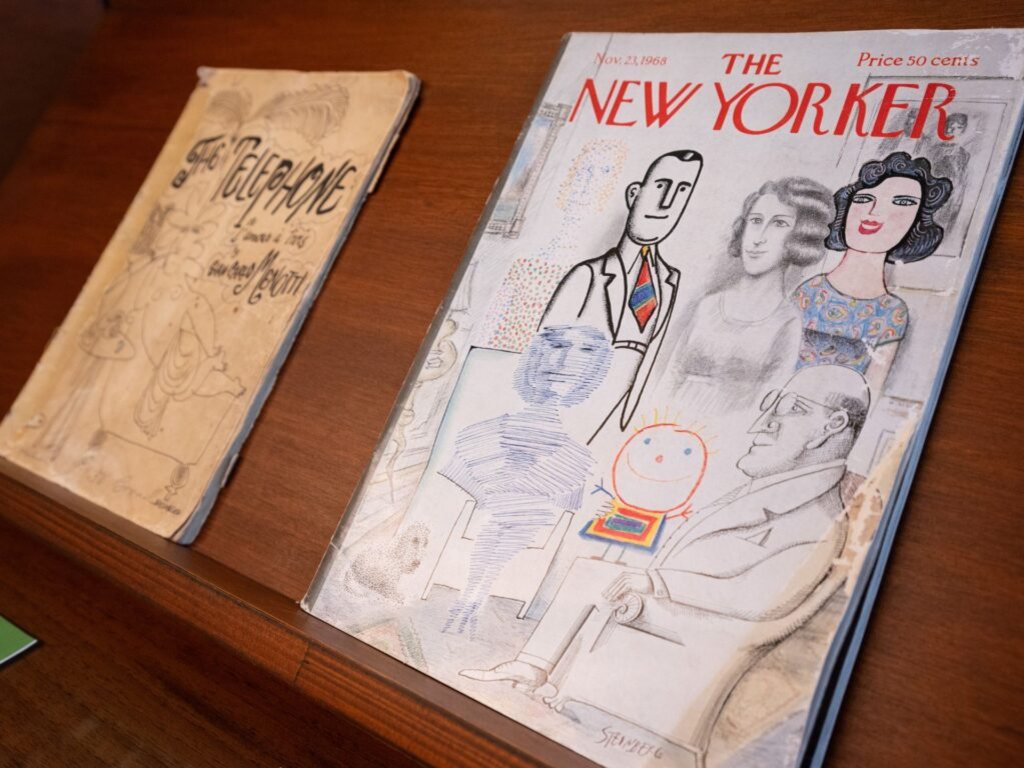
Saul Steinberg: dal Politecnico al New Yorker
Roberto Dulio racconta la storia di uno straordinario artista e architetto, alumnus politecnico

Innovazione e multidisciplinarità al servizio della riabilitazione
Dentro WE-COBOT LAB, eccellenza nella robotica indossabile e collaborativa, con un focus su riabilitazione e supporto a persone fragili.
Chi siamo
Il magazine della ricerca del Politecnico
Frontiere è la rivista che racconta a tutti la ricerca che si fa al Politecnico di Milano. Un sito internet e una newsletter mensile dedicati a tutti quelli che vogliono conoscere i volti e le storie delle persone impegnate nella ricerca, le attività che si svolgono nei nostri laboratori, l’impatto che tutto questo ha sulle nostre vite, sulla società e sul mondo. Uno sguardo acuto e accessibile che analizza il presente, valorizza il passato e guarda alle nuove frontiere del futuro.
Scopri di più
Temi di ricerca